本文整理了常用的机器学习算法以备面试。
逻辑回归
逻辑回归的基本假设:假设数据服从伯努利分布,以p概率取1,1-p概率取0,这样的模型就是逻辑斯蒂回归模型
逻辑回归的损失函数:最大化对数似然, 使用梯度下降法来不断逼近最优解。
为什么要用最大似然估计?
- 从求最优解的角度:用最小二乘的目标函数是非凸的,容易局部最优,而对数似然函数是一个凸函数,可以用梯度下降法来求解。
- 收敛速度:最小二乘的收敛速度慢,最大似然收敛快
类似的问题:线性回归为什么用最小二乘?
最小二乘法以估计值与观测值的平方和作为损失函数,在误差服从正态分布的前提下,与极大似然估计的思想在本质上是相同。
LR的优缺点
- 优点:结构简单,可解释性强,训练速度快
- 缺点:很难拟合数据的真实分布,很难处理数据不平衡的问题,处理非线性数据比较麻烦。
LR和SVM的区别:
损失不同
LR是参数模型,SVM是非参数模型。 参数模型和非参数模型中的“参数”并不是模型中的参数,而是数据分布的参数。
参数模型和非参数模型
参数机器学习模型由于指定了目标函数的形式,所以可以极大地简化这个学习的过程,但是同样会限制学习的过程。所以参数机器学习模型包括两个部分:1、选择合适的目标函数的形式。2、通过训练数据学习目标函数的参数。
非参数机器学习算法对目标函数形式不做过多的假设,因此算法可以通过对训练数据进行拟合而学习出某种形式的函数。 常见的非参数机器学习模型包括:决策树,朴素贝叶斯,SVM,神经网络。
- SVM不直接依赖数据分布,而LR则依赖,因为SVM只与支持向量那几个点有关系,而LR和所有点都有关系。
- LR是经验风险最小化模型(极大似然估计),SVM是结构风险最小化模型(等价于加了正则化)
SVM
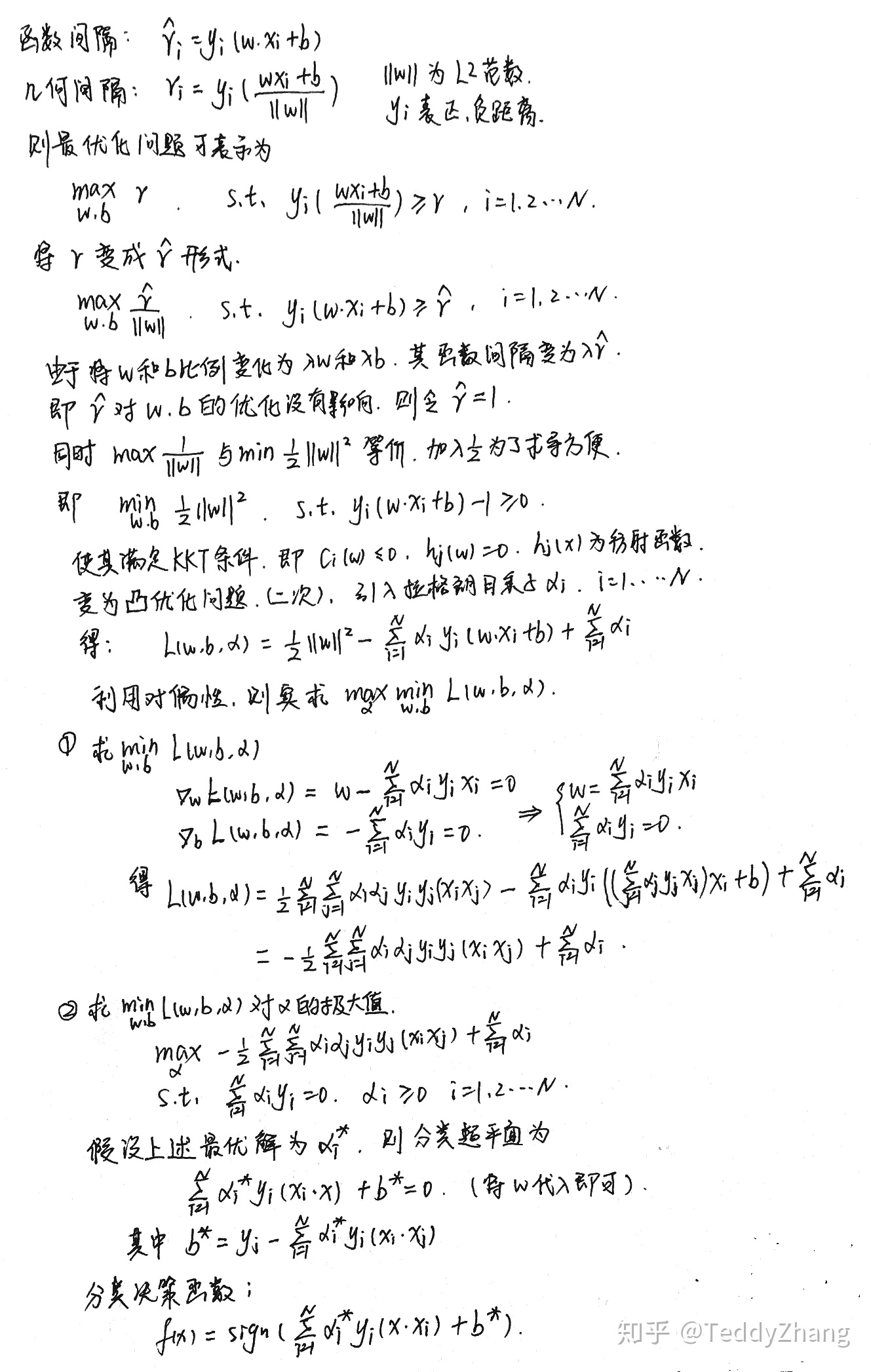
SVM简单来说,对于线性可分的数据,最大化一个硬间隔支持向量机,近似可分时,最大化软间隔支持向量机,线性不可分时,使用核技巧学习非线性支持向量机。
函数间隔和几何间隔
函数间隔受参数w影响,几何间隔除以L2范数,是确定的
对偶问题
对偶问题更容易求解,把目标函数和约束融为拉格朗日函数,通过这个函数来寻找最优解。
可以自然的引出核函数,进而推广到非线性分类问题
引入核函数
原本的样本空间线性不可分,通过核函数把样本映射到一个线性可分的空间去,这样以后,求解对偶问题只需知道核函数,求解难度下降。
核函数之间的区别
线性核:适用于线性可分,参数少,训练快
高斯核:适用于线性不可分,参数多,分类结果依赖于参数的好坏
手推SVM
朴素贝叶斯
定义:对于给定的训练数据集,首先基于特征条件独立假设学习输入/输出的联合概率分布,然后基于该模型,对于给定的输入x,利用贝叶斯定理求出后验概率最大的输出y。
为什么朴素? 在计算P(X|Y)时引入了很强的特征独立,这样做可以避免求解时面临的组合爆炸和样本稀疏问题。
优点: 对小规模的数据表现很好,适合多分类任务,适合增量式训练。收敛快。
- 缺点: 对输入数据的表达形式很敏感(离散、连续,值极大极小之类的)。 条件独立性假设。
KNN
算法原理:采用测量不同特征值间的距离或相似度的方法进行分类。如果一个样本在特征空间的K个最相似(最近邻)的样本中的大多数属于某个类别,则该样本也属于该类别。
算法决策过程:
- 计算新数据与训练集中的特征相似度或距离
- 取TopK个最近邻的数据分类的标签
- TopK中出现最多的作为最终的分类标签
- K的取值
- k值小:过拟合 噪声敏感
- k值大:欠拟合
- 进阶:kd树
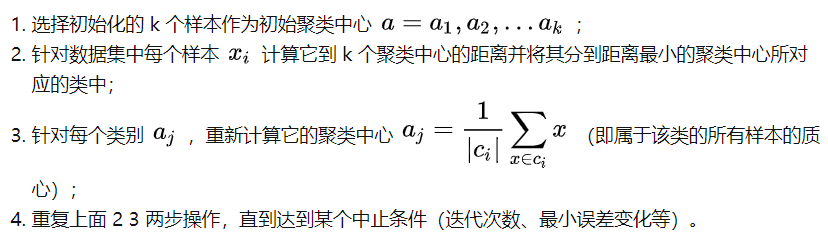
K-means
K-Means的一个重要的假设是:数据之间的相似度可以使用欧氏距离度量,
(注:可以使用欧氏距离度量的意思就是欧氏距离越小,两个数据相似度越高)
算法步骤:
优点
- 容易理解,聚类效果不错,虽然是局部最优(EM算法容易陷入局部最小值), 但往往局部最优就够了;
- 处理大数据集的时候,该算法可以保证较好的伸缩性;
- 当簇近似高斯分布的时候,效果非常不错;
- 算法复杂度低。
缺点
- K 值需要人为设定,不同 K 值得到的结果不一样;
- 对初始的簇中心敏感,不同选取方式会得到不同结果;
- 对异常值敏感;
- 样本只能归为一类,不适合多分类任务;
- 不适合太离散的分类、样本类别不平衡的分类、非凸形状的分类。
改进
数据预处理,去除异常点(数据归一化)
合理选择K值(手肘法)
基于欧式距离的 K-means 假设了了各个数据簇的数据具有一样的的先验概率并呈现球形分布,但这种分布在实际生活中并不常见。
采用核函数, 主要思想是通过一个非线性映射,将输入空间中的数据点映射到高位的特征空间中,并在新的特征空间中进行聚类。
二分k-means
基础版K-means代码
1 | import numpy as np |
2 | import math |
3 | |
4 | |
5 | def calDistance(vecA, vecB): # 欧式距离 |
6 | return sum((vecA - vecB) ** 2) ** 0.5 |
7 | |
8 | |
9 | def initCentroids(dataSet, k): |
10 | numSamples, dim = dataSet.shape |
11 | centroids = np.zeros((k, dim)) |
12 | for i in range(k): |
13 | index = int(np.random.uniform(0, numSamples)) |
14 | centroids[i, :] = dataSet[index, :] |
15 | return centroids |
16 | |
17 | |
18 | def kmeans(dataSet, k): |
19 | numSamples = dataSet.shape[0] |
20 | # first column stores which cluster this sample belongs to, |
21 | # second column stores the error between this sample and its centroid |
22 | clusterAssment = np.mat(np.zeros((numSamples, 2))) # np.mat 仅仅是生成矩阵 # 相当于np.matrix |
23 | clusterChanged = True |
24 | |
25 | ## step 1: 创建k个点作为起始质心 |
26 | centroids = initCentroids(dataSet, k) |
27 | |
28 | while clusterChanged: |
29 | clusterChanged = False |
30 | ## 对每个样本点 |
31 | for i in range(numSamples): |
32 | minDist = np.inf |
33 | minIndex = 0 |
34 | ## step 2: 对每个质心 |
35 | for j in range(k): |
36 | distance = calDistance(centroids[j, :], dataSet[i, :]) |
37 | if distance < minDist: |
38 | minDist = distance |
39 | minIndex = j |
40 | |
41 | ## step 3: 将数据点分配到距其最近的簇 |
42 | if clusterAssment[i, 0] != minIndex: |
43 | clusterChanged = True |
44 | clusterAssment[i, :] = minIndex, minDist ** 2 |
45 | |
46 | ## step 4: 更新质心 |
47 | for j in range(k): |
48 | pointsInCluster = dataSet[np.nonzero(clusterAssment[:, 0] == j)[0]] |
49 | centroids[j, :] = np.mean(pointsInCluster, axis=0) # 把每个簇中的所有点的均值作为新的质心 |
决策树
几个基本概念:
- 熵:表示随机变量不确定性的度量H(X)
- 条件熵:已知随机变量X的条件下随机变量Y的不确定性H(Y|X)
- 信息增益:表示得知特征X的信息而使得类Y的信息的不确定性减少的程度g(D) = H(D)-H(D|A)
决策树生成的经典算法:ID3和C4.5 分别按照信息增益和信息增益比来选择特征
决策树的剪枝
CART算法
CART是给定输入随机变量X条件下输出随机变量Y的条件概率分布的学习方法。
它假设决策树是二叉树。 CART树的生成就是递归地构建二叉决策树的过程。对回归树用平方误差最小化准则,对分类树用基尼指数最小化准则,进行特征选择,生成二叉树。
随机森林
用随机的方式建立一个森林。RF 算法由很多决策树组成,每一棵决策树之间没有关联。建立完森林后,当有新样本进入时,每棵决策树都会分别进行判断,然后基于投票法给出分类结果。